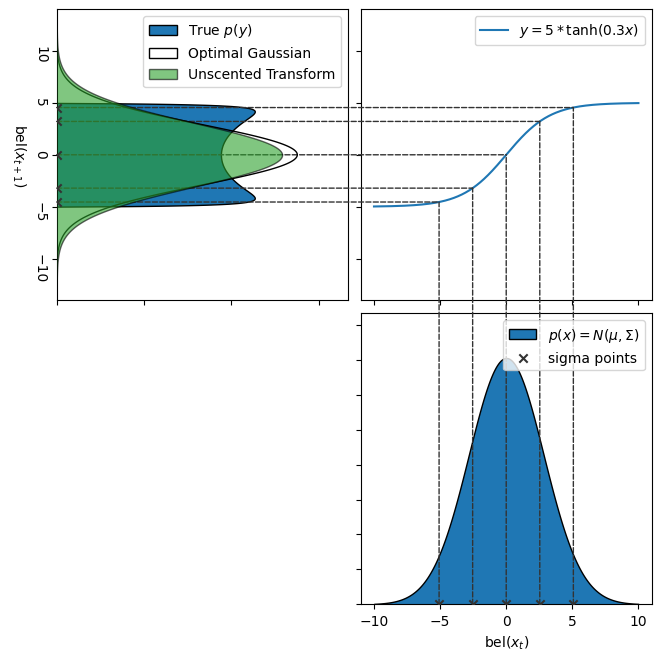
A Variant of the Unscented Kalman Filter
The EKF and UKF are the de-facto state estimators for non-linear systems. In this work we explore a novel variant of the UKF that achieves better performance than the classic implementation on highly non-linear and chaotic systems, at a small performance cost.
Continue reading






 be a connected graph with
be a connected graph with  vertices and
vertices and  edges. If
edges. If  -cycle, then
-cycle, then  . . .
. . .